Caves are
dangerous
unlit
unstable
unpredictable
treacherous
unexplored
unmapped

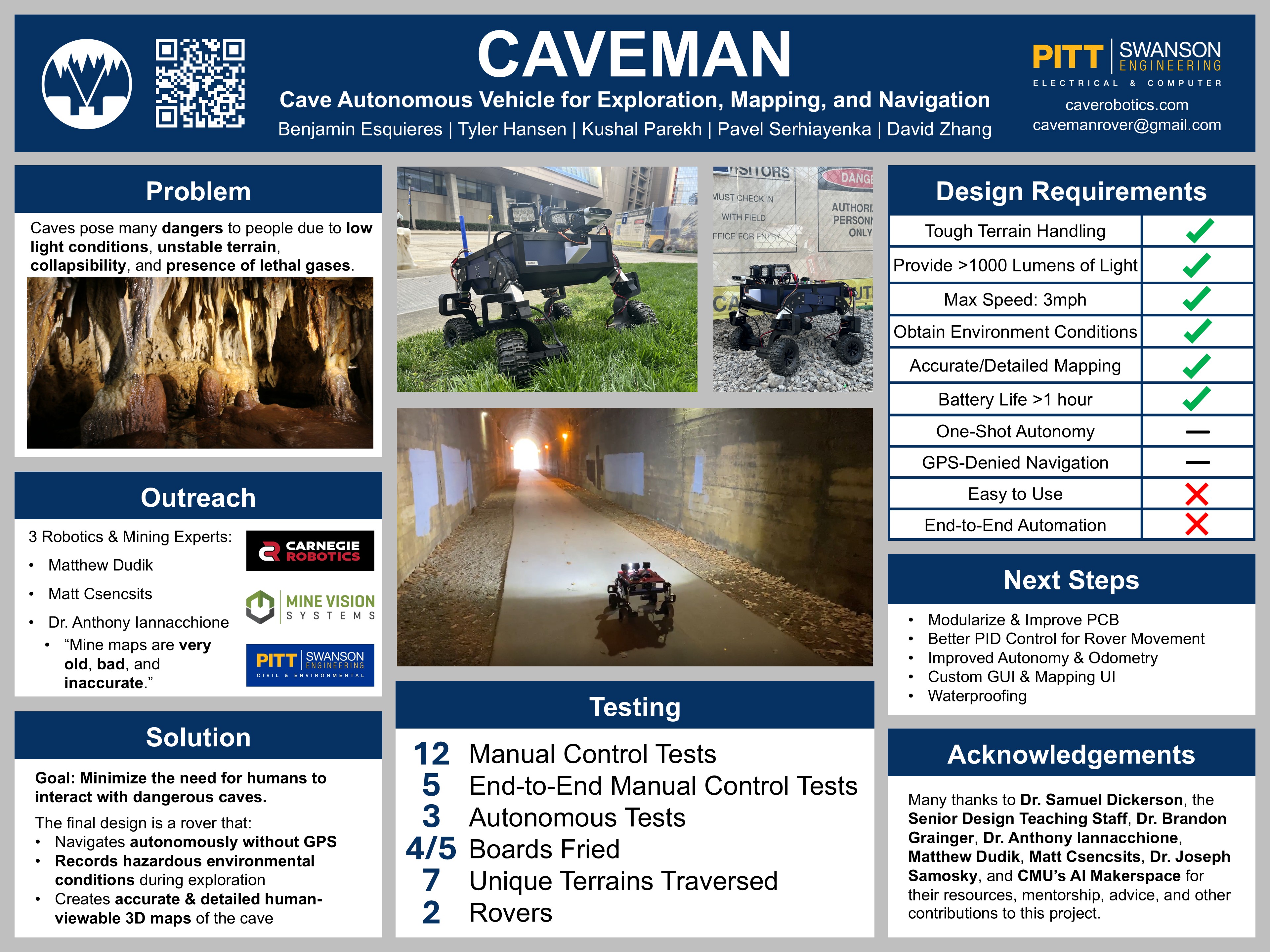
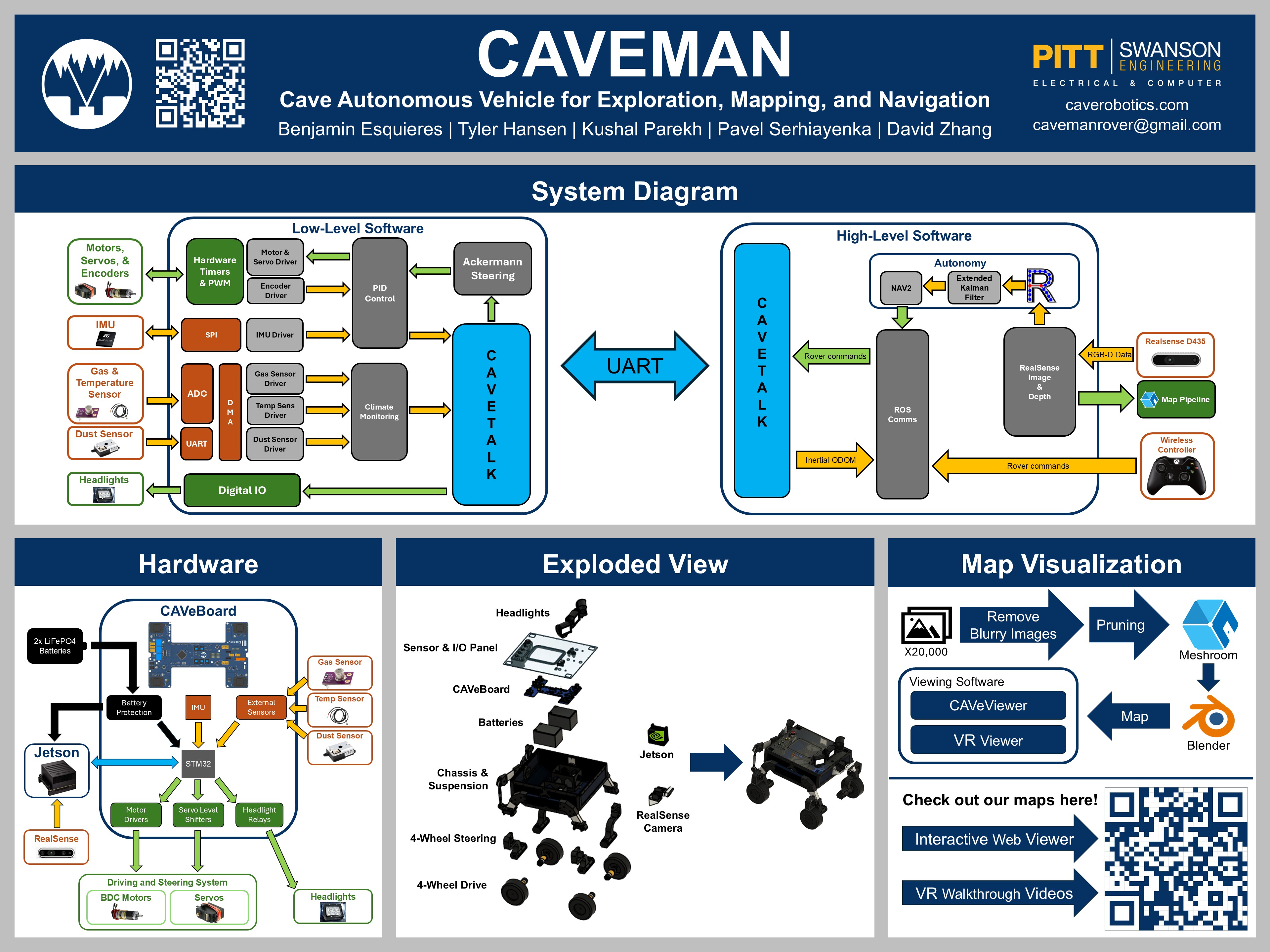

From idea to final product, our team developed this robot over the course of 1 college semester. Utilizing a custom PCB & Embedded Control, ROS2, and Computer Vision, this robot autonomously navigates cave environments. With tireless development and testing, we integrated all facets of engineering and design to create this functional rover.



